The rubbing of rotors against casings is a serious problem confronting the design of rotating machinery of all sizes from small pumps, large gas turbines of jet engines and massive steam turbines of power plants. The designers have to grapple with minimum clearance between the spinning rotor and stationary casing for maximum efficiency at the risk of contact between them.
Imagine inside a rotating machine, a central shaft (the rotor) that spins at incredible speeds, just fractions of a millimetre away from its outer housing (the stator) suddenly comes into contact with it. This rubbing caused by the vibration of the rotor due to rotating unbalance, component degradation and deviation in operating parameters leads to poor performance, operation malfunction and catastrophic failures with consequent large downtime and operation and maintenance cost.
Hence the study of the dynamic analysis of rubbing in rotor-stator systems becomes very important. However, this study is complex due to the strong and discontinuous nonlinearities and uncertainty that enter the problem due to stiffening, friction, impact and noise.
To study this complex problem initially the basic Jeffcott rotor model is considered, as it is a simplified mathematical model commonly used to study the single rotor-stator vibration problem and the rubbing phenomenon. However, this model is not realistic and applicable in the study of the rotor dynamics of aero engines and steam turbines, where there are dual or multi-rotor systems. The Jeffcott model can be extended to study the more complex systems.
Therefore, in this study, the authors, Dr. Pankaj Kumar from Dynamics Analysis Group, Bharat Heavy Electricals Limited, Nagpur, India; Prof. S. Narayanan(retired) and Prof. Piyush Shakya from the Department of Mechanical Engineering, Indian Institute of Technology (IIT) Madras, Chennai, India; have numerically and experimentally investigated the rub-induced nonlinear vibration characteristics of multi-degree of freedom of a non-smooth rotor-stator system modelled by the extended Jeffcott Rotor model. The non-smoothness and discontinuity in the problem arise mainly because of the rubbing and the resulting impact.
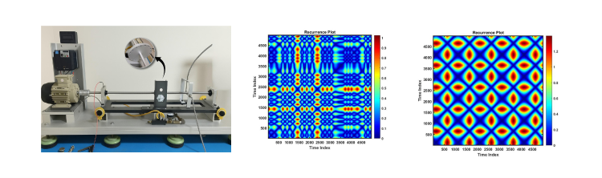
Figure 1: Lab setup used in this study with recurrence plot during rubbing in rotor and recurrence plot for smooth rotor
First, a Two Degree-of-Freedom (DOF) [degree-of-freedom commonly refers to the number of ways in which a system can move or precisely the number of independent coordinates required to describe the motion] Jeffcott model with symmetric and asymmetric support stiffness with cross-coupling was considered.
Next, a Four DOF rotor-stator model was developed, where the rotor impacts the stator and the contact force is modelled by a nonlinear compliant contact model that includes local stiffness of the stator coating with a wear layer which is modelled as a viscoelastic material. (viscoelasticity refers to the property of a material which behaves like a semi-solid under the action of forces with stress depending on strain as well as strain rate.)
Also, usually the complex noisy nonlinear response for rotor-stator rubbing under mixed uncertainty has not been sufficiently addressed. Therefore, in this study the effect of noise on rub-induced rotor vibration has also been considered.
In this study, the mechanism of different forms of rotor-stator rubbing in a nonlinear rotor subjected to unbalance and coloured Gaussian white noise excitation has been numerically investigated. Stochastic bifurcation analyses have been carried out to investigate the stability characteristics of the rotor-stator system.
For contact analysis, having components with surface coating, the contact stiffness of the coating affects the overall dynamic characteristics. In the case of soft coating, local deformation mainly depends on the extent of deformation of the coatings. In contrast, for hard coatings, deformation is the function of structural deformation of the rubbing components.
The effects of shaft speeds has also been taken into account. It was observed, that for lower shaft speeds, the gravitational effect dominates the unbalance force, leading to substantial directional variation in stiffness. But at higher speeds, the effect of gravity becomes negligible as the increased centrifugal force overcomes its influence, resulting in a symmetric orbital motion.
This new study, featuring a sophisticated Two as well as Four-Degree-of-Freedom model, incorporates both random noise and complex “compliant” contact models, allowing for a much more accurate prediction of nonlinear, chaotic vibrations.
By understanding how different materials and contact forces cause these abrupt changes, engineers can design better rotor and casing of turbines and engines to avoid rubbing leading to long life, lower maintenance costs, and, most importantly, offering ways to improve safety in aerospace and power generation industries.
The outcomes of the numerical investigation were further qualitatively compared with experimental results and field data from rotating machinery undergoing rotor-stator rubbing. Experimental studies were also conducted on a laboratory test rig to simulate rubbing using a Jeffcott rotor model and a movable elastic rod at various rotating speeds. The simulation results were found to agree with fault features obtained from experiments and field data from industries lending validation to the numerical and analytical study.
Mr. Ram Bahadur Singh, who is a Project Manager, Gas Turbine R&D, COE and Mods & Upgrades, at Siemens Energy Products, USA, acknowledged the importance of the authors’ work with the following comments: “This research addresses the critical challenge to tackle a real-world scenario for—noisy, uncertain environments—rather than idealized, smooth simulations in turbine design and rotor dynamics analysis. While deterministic models are common, this research better simulates “real-world” industrial conditions where manufacturing errors and assembly deviations are ubiquitous. It advances our ability to predict, rather than just react to, catastrophic failures in turbomachinery. The study is lauded for integrating parametric uncertainty and white noise into a non-smooth Jeffcott rotor model. Another key strength identified is the comparative analysis of different contact force models (e.g., Hertzian vs. linear). This addresses a long-standing debate on how contact mechanics influence the prediction of chaotic motion and instabilities like dry whip and whirl. This manuscript also focuses on discontinuity induced bifurcation (DIB), a specific class of bifurcation that occurs at the precise moment of contact switching. This is critical for predicting “jump phenomena” and sudden transitions to chaos that standard smooth bifurcation analysis might miss.”
Article by Akshay Anantharaman
Click here for the original link to the paper